マイクロビット(e_37)MOVEmini 組み立て

MOVE miniを組み立て
KitronikのMOVE miniという二輪バギーキットを使ってみます。サーボモータなどの制御をmicro:bitで行います。秋月電子通商で2018/07/23に3850円で買ったまま眠っていました。組み立てして動かしてみようと思います。組上りは外箱の絵のような約7~8cmのサイコロ状です。
取説も入っているので見ながら組み立ててみました。数か所、やや悩んだところがあったので手順を記載します。
サーボモータ調整
サーボモータ(FS90R)の調整をしてから組み立てる必要があります。調整なしで組んでしまうと元に戻って組みなおしになります。
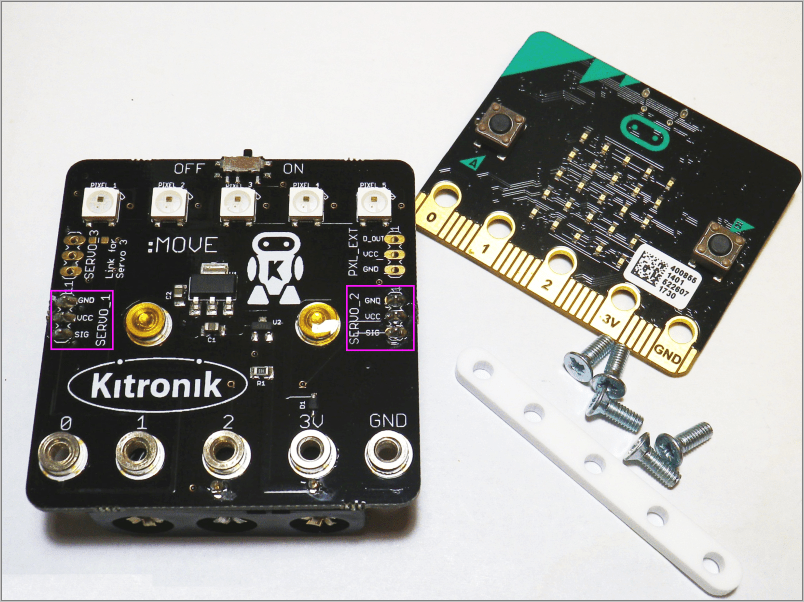
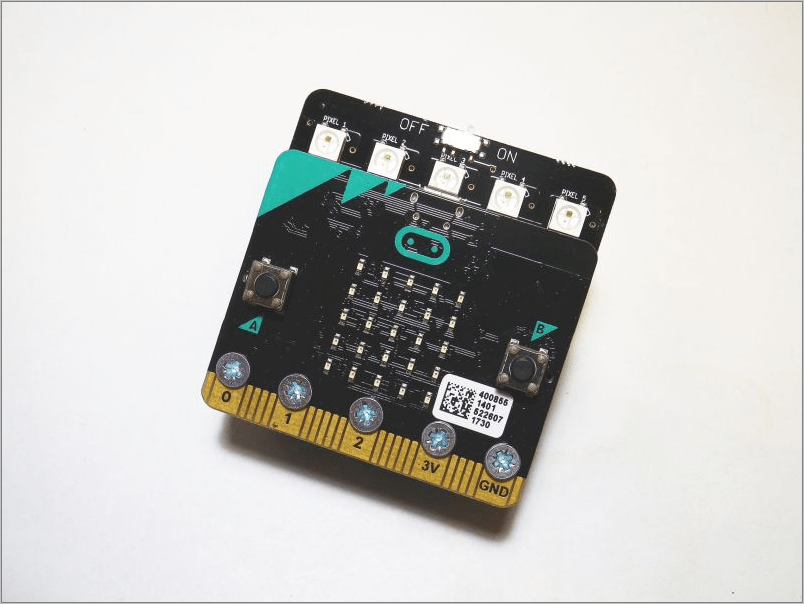
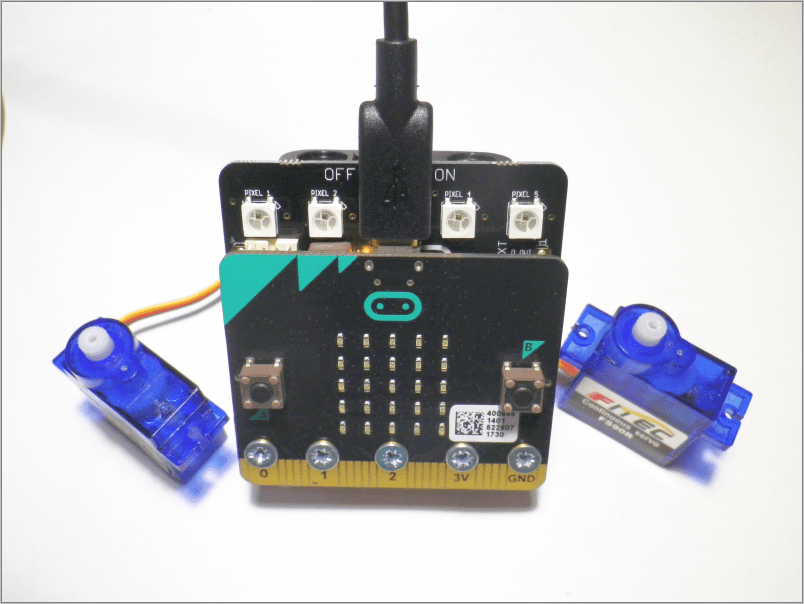
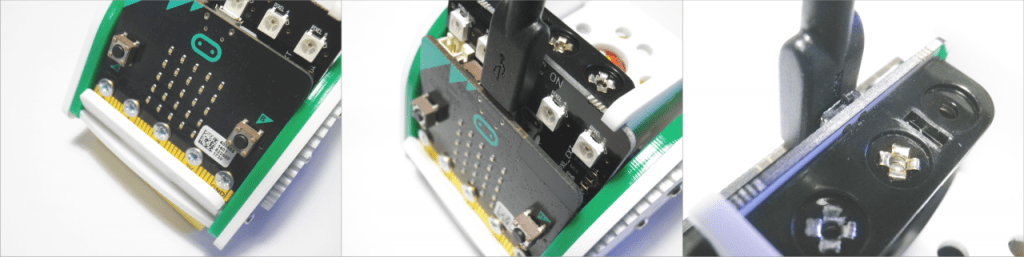
micro:bitを電源ユニット基板に取り付けます。スペーサを入れて付属のネジで止めるだけです。
micro:bitにあるボタンA側がSERVO_1(右 right)B側がSERVO_2(左 left)になります。進行方向に右、左です。※サーボの調整を行うと左右がハッキリします。
各ピンの役割は取説の最後の方(30P)に
P0:ZIP LED OUTPUT RGB-LED(NeoPixcel)5ケの制御用
P1:RIGHT SERVO OUTPUT 右側サーボの制御用
P2:LEFT SERVO OUTPUT 左側サーボの制御用
とあります。ねじ止めすれば接続されます。
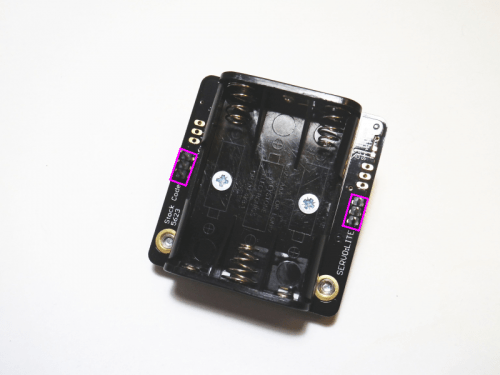
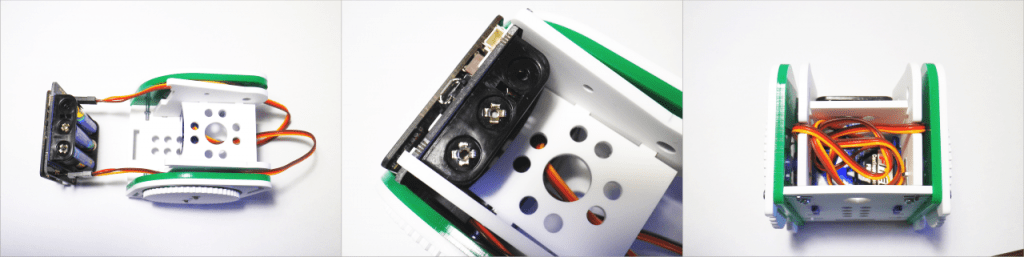
サーボをつなぐピンは上からGND、VCC、SIG(P1 P2)です。見難いですが写真の赤枠内に「GND、VCC、SIG」記載があります。
電源基板
電源基板を組みます。
電源基板に取り付けた状態の写真(表面)です。ねじ止めするだけです。
裏面です。写真の右側にあるシルク文字SERVO:LITEはPCBの名前のようです。赤枠にサーボモータのコネクタをつなぎます。
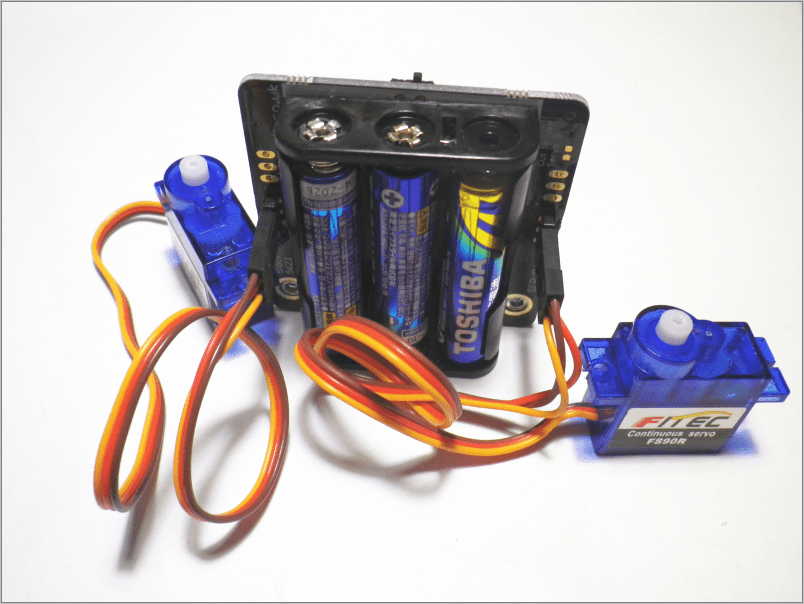
サーボモータFS90Rを接続します。
間違わないように接続します。ピンは上からGND、VCC、SIGです。各々リボン線の茶、赤、橙と接続します。(茶が上、両方とも)
電池を実装します。
次写真の上のON-OFFスイッチはOFFにしておきます。付属の単4電池を極性を間違わないように実装します。※写真の電池は手元にあったモノを使ってます。
USBを接続します。
USBの端子は薄手の物でないと組みあがった後は入りません。写真の物は約5.6mm厚です。
※micro:bitにthonny-microbitをインストール済みとして記載しています。
スクリプト
サーボモータFR90Rの調整をします。詳細は記事e_36を参照してください。
以下のスクリプトをThonnyで実行します。※thonny-microbitのMicroPythonを使っています。
from microbit import *
s_pin=pin1 # servo right(pin1)_A left(pin2)_B
def POSI(pwm):
s_pin.write_analog(0) #先にwrite_analogモード、出力は’0’V
s_pin.set_analog_period(20) #周期を設定 20msec 22
s_pin.write_analog(pwm)
print('pwm %3d' %pwm)
# FS90R ajust
pos_L=118 #2.3ms +41 2.3/20*1024=117.76 CCW(L)
pos_M=77 #1.5ms 0 1.5/20*1024= 76.8 STOP
pos_R=36 #0.7 -41 0.7/20*1024= 35.84 CW(R)
POSI(pos_R) # CW
sleep(1000)
POSI(pos_M)
sleep(1000)
POSI(pos_L) # CCW
sleep(1000)
POSI(pos_M) # STOP 動くなら裏面のネジで調整する
sleep(1000)
以下のような結果がThonnyのshellに表示されます。
>>> %Run move_mini_servo_01.py
pwm 36
pwm 77
pwm 118
pwm 77
>>>
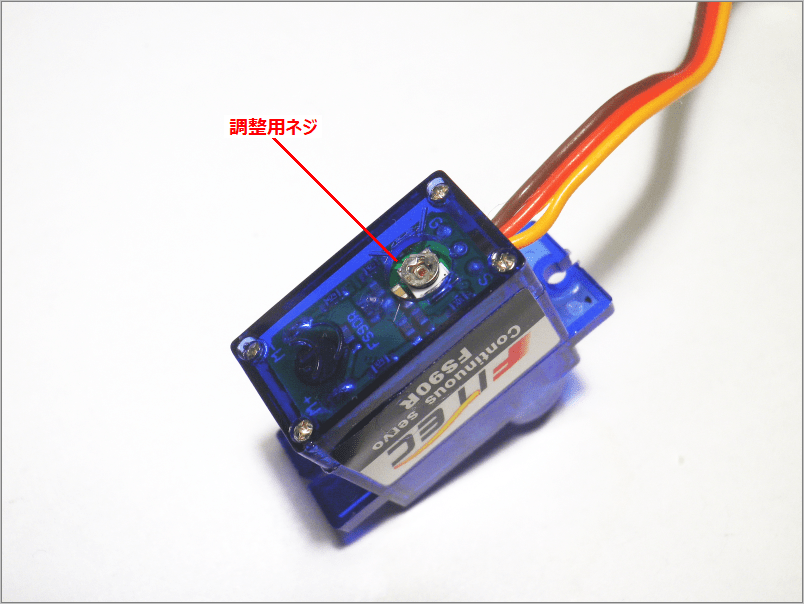
調整ネジ
実行後にサーボモータが停止せずに動いていると思います。サーボモータ裏面のネジで停止するように調整します。
一度、スクリプトを停止(ThonnyのSTOPアイコン)し、再実行して停止状態を確認します。
停止していればOKです。
スクリプトのs_pin=pin1をs_pin=pin2に書き換えて、もう一方のサーボモータを同様に調整します。
車体の組み立て
車体の組み立てをします。
車輪部、外側板部
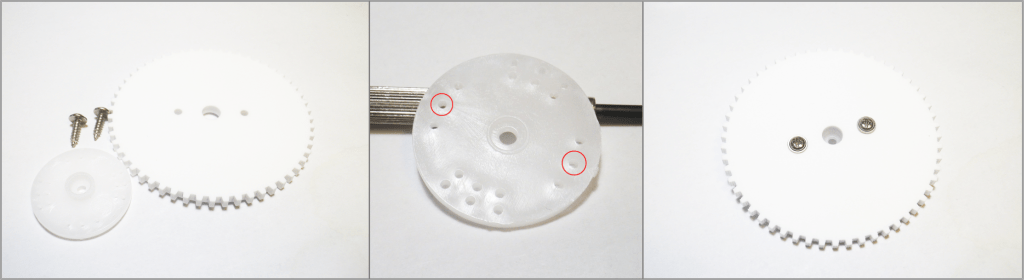
車輪を2つ組みます。写真中のサーボ取付け円板の赤丸印した穴に車輪をビス止めします。写真にはありませんがませんか、ビスはかなり突きでます。
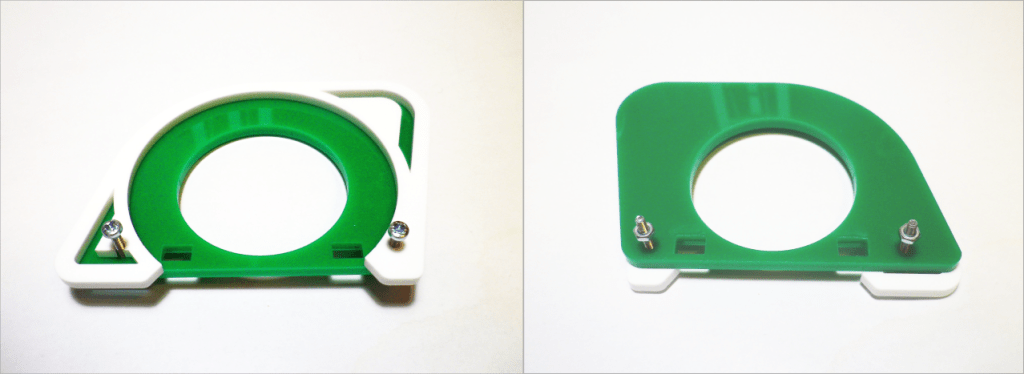
外側板を組みます。
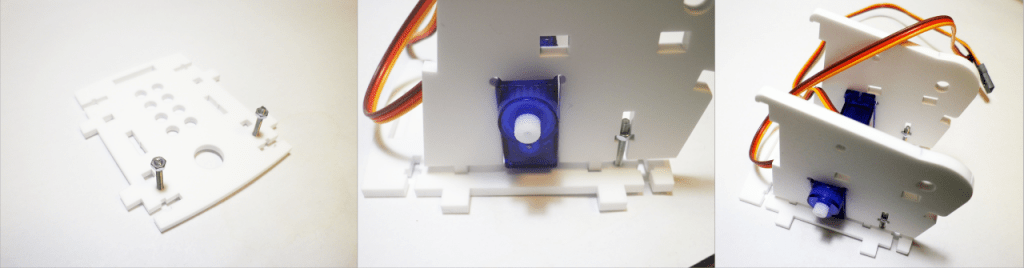
底板、サーボ
サーボモータを底板に取り付けます。以下のようになります。サーボモータは強めに押し込むと下まで入ります。側壁板をねじ止めして取り付けます。
※組み立ての最後で、MOVEの文字があるバンパー?micro:bitの脱落防止板を取り付けます。底板は脱落防止板の入りやすい方を上にした方が良さそうです。この段階で調べて見てください。
側板、車輪
側板と車輪を取り付けます。付属のネジでは車輪を取り付け難かったので他のネジで止めました。ここまでの組付けでは、グラグラして華奢な感じです。
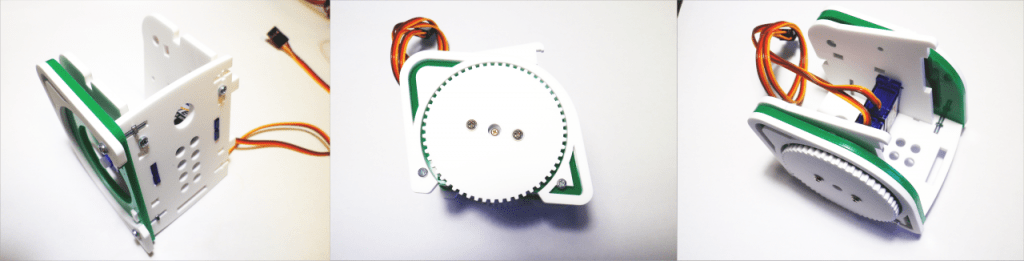
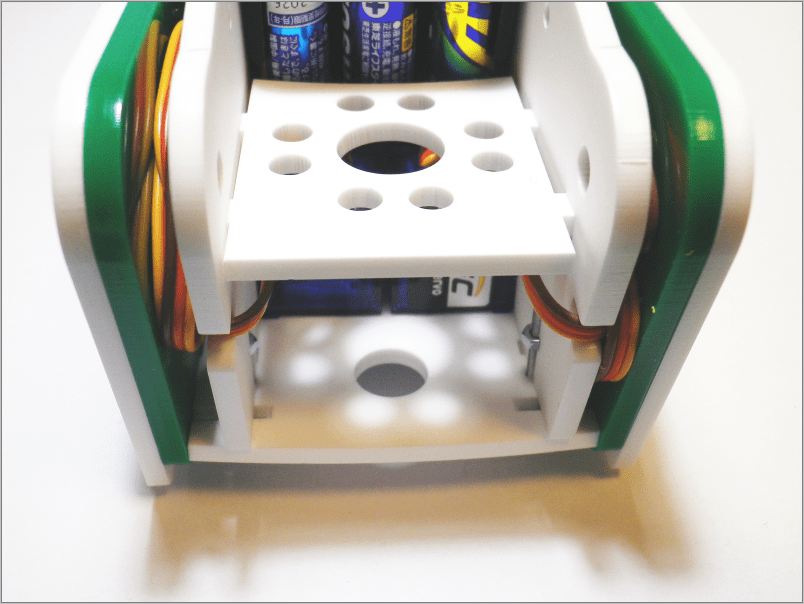
中板、組付け
中板を取り付けます。入り難ければ少し側板のネジを緩めれば良いと思います。
側壁と側板の間にサーボモータのリボン線を通して、電源基板のサーボモータの端子にコネクタを差します。茶が上側です。側壁板の上部の鍵部に引っかかるように電源基板を取り付けます。窮屈ですが側壁と側板の間にコネクタがちょうど挟まります。余ったリボン線を適当に収納します。
バンパー、USB
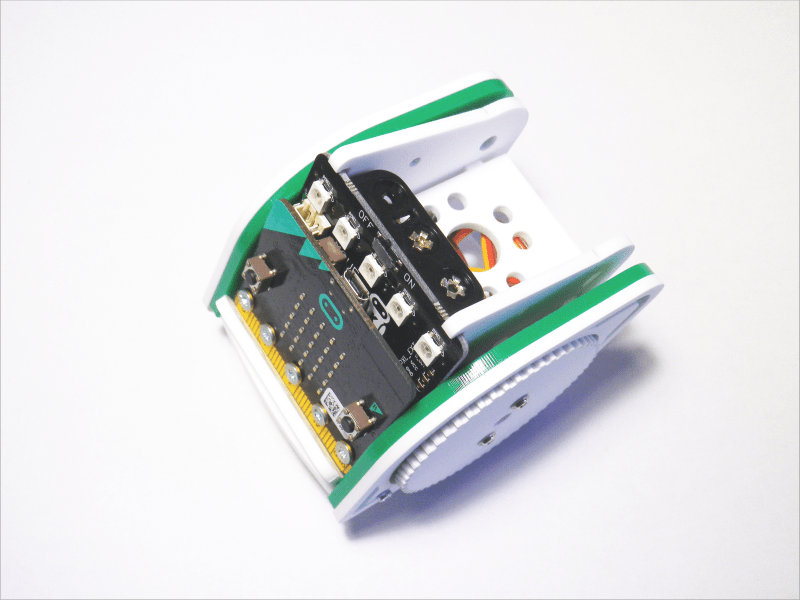
micro:bitの脱落防止板?バンパー?を取り付けて完成です。
USBを接続した状態です。ギリギリです。厚みの薄いUSBでないとON-OFFのスイッチにあたって入りません。リセットボタンは楊枝か何か使わないと押せません。
完成図
完成した状態です。
まとめ
MOVEminiの組み立てに付いて記載しました。
<追記>
後々に分かりましたが、
中板と底板の穴にマジックペンをさしたりするようです。邪魔にならないようにリボン線は側壁と側板の間に押し込みました。