Raspberry Pi Pico(s_25)uasyncio の動作例 Lock

uasyncio.Lock()
Raspberry Pi PicoのMicroPythonにはmodule’uasyncio’があります。
uasyncioを使うと非同期動作するそうです。並行処理ができるようです。
uasyncioを使ってIRセンサー FC51の検知動作を確認します。
IRセンサー FC51の外観、接続例は記事d_28を参照ください。
記事s_23では、Sens()でIRセンサーの常時検出、LED1()常時点滅、LED2()検出後5回点滅動作を並行処理していました。センサーの検出はフラグで認識していました。そのためLED2()処理時もSens()動作が行われていました。
module’uasyncio’にあるclass ‘Lock’でSens()とLED2()をLockすればLED2()処理時にSens()動作をブロックできそうです。
素人なので詳しくはわかりません。わかる範囲でLockの動作を確認してみようと思います。
※開発環境はThonnyです。ThonnyでMicroPythonをRaspberry Pi Pico with RP2040にインストールして使っています。
class ‘Lock’
class ‘Lock’にはlocked、release、acquireのメソッドがあります。
lock = uasyncio.Lock()で初期化した場合の例になります。
■lock.acquire()
ロックを取得します。ロックを取得して実行されるコルーチンは、最初にロックの待ち受けをしたコルーチンです。
■lock.release()
ロックを開放します。
■lock.locked()
ロック状態をTrue/Falseで返します。
Lock 動作
Lock動作の雰囲気だけ確認します。
単純に以下の時間を脳待機するだけの関数aaa、bbb、cccとします。
aaa 2sec 待機
bbb 1sec 待機
ccc 0.4sec 3回繰り返し
「aaa > bbb > ccc」で進行するものとします。
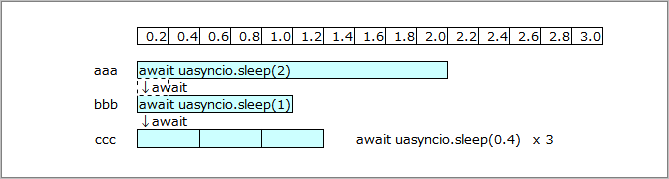
すべてをawait uasyncio.sleep(?)で処理すると、並行処理されるので
aaaは2sec後、bbbは1sec後、cccは1.2秒後に終了します。
終わる順番はbbb、ccc、aaaになります。
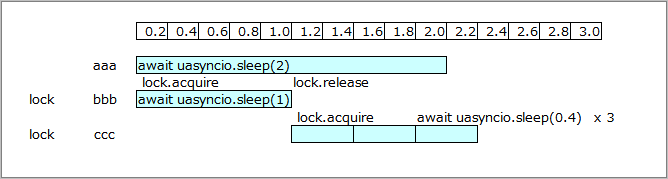
上記のbbbとcccにロック処理すると、bbbが開始されるとcccをブロックします。cccの実行は1sec後bbbが終了した後になります。結果、cccの終了は開始から1.0+1.2≒2.2sec後になります。aaaはロックされていないので2sec後に終了します。
終わる順番はbbb、aaa、cccになります。
以下のスクリプトで動作を確認しました
#lock_test_02b.py
from machine import Pin
import time
import uasyncio
async def aaa():
global st
et=uasyncio.ticks()
print('aaa>>>>>>>>>>>>>>>>',et-st)
await uasyncio.sleep(2)
et=uasyncio.ticks()
print('>>>>>>>>>>>>>>>>aaa',et-st)
async def bbb(lock):
global st
await lock.acquire() #ロック取得
et=uasyncio.ticks()
print('bbb>>>>>>>>>>>>>>>>',et-st)
await uasyncio.sleep(1)
et=uasyncio.ticks()
print('>>>>>>>>>>>>>>>>bbb',et-st)
lock.release() #ロック解放
print('release>>>>>>>>>bbb',et-st)
async def ccc(lock):
global st
await lock.acquire()
for i in range(3):
et=uasyncio.ticks()
print('ccc>>>>>>>>>>>>>>>>',et-st)
await uasyncio.sleep(0.4)
et=uasyncio.ticks()
print('>>>>>>>>>>>>>>>>ccc',et-st)
lock.release()
print('release>>>>>>>>>ccc',et-st)
async def main():
global st
st=uasyncio.ticks()
# create a shared lock 共有ロックを作成する
lock = uasyncio.Lock()
task1 = uasyncio.create_task(aaa())
task2 = uasyncio.create_task(bbb(lock)) #ロック使用を設定
task3 = uasyncio.create_task(ccc(lock)) #ロック使用を設定
await task1
await task2
await task3
uasyncio.run(main())
実行すると以下のようになります。右端の数値は開始からの経過時間です。
なんとなくLock動作がわかったような気がします。
>>> %Run -c $EDITOR_CONTENT
aaa>>>>>>>>>>>>>>>> 15
bbb>>>>>>>>>>>>>>>> 16
>>>>>>>>>>>>>>>>bbb 1016
release>>>>>>>>>bbb 1016 # bbb終了 約1sec後
ccc>>>>>>>>>>>>>>>> 1017
>>>>>>>>>>>>>>>>ccc 1417
ccc>>>>>>>>>>>>>>>> 1417
>>>>>>>>>>>>>>>>ccc 1818
ccc>>>>>>>>>>>>>>>> 1818
>>>>>>>>>>>>>>>>aaa 2016 # aaa終了 約2sec後
>>>>>>>>>>>>>>>>ccc 2218
release>>>>>>>>>ccc 2218 # ccc終了 約2.2sec後
>>>
スクリプト
Lockの動作がなんとなくわかったので、
記事d_29のSens():IRセンサーの常時検出、LED2():検出後5回点滅動作にロックを設定してLED2()処理時にSens()動作をブロックするように変更します。LED2()処理時もLED1()は並行動作します。
スクリプトは以下のようにしました。
led_while_lock_01b.py
#!/usr/bin/env python
# -*- coding: utf-8 -*-
from machine import Pin
import time
import uasyncio
#OUT Pin
led1=Pin(22, Pin.OUT, value=0) #R-LED(常時点滅)
led2=Pin(26, Pin.OUT, value=0) #Y-LED(検出点滅)
#led1.value(0,1) led1(0,1) led1.high(),led1.low()
#FC-51 IR Detector Pin
dpin=Pin(27, Pin.IN, Pin.PULL_DOWN) # 検出 dpin='L'
#LED1は常時点滅
async def LED1():
global detect
print('LED1------')
while True:
led1.high()
print('LED1 on')
await uasyncio.sleep(0.2)
led1.low()
await uasyncio.sleep(0.2)
print('------LED1 ',detect)
#FC-61常時監視 検出したらdetect=1
async def Sens(lock):
global detect # detect:検出フラグ
print('Sens------')
while True:
await lock.acquire() #ロック取得
if dpin.value()==0:
print('detect')
detect=1
print('------Check',detect)
await uasyncio.sleep(0.5)
lock.release()#ロック解放
#検出後の処理 led2点滅 5回
async def LED2(lock):
global detect # detect:検出フラグ
print('LED2------')
while True:
if detect==1:
await lock.acquire()#ロック取得
for i in range(5):
print(f'LED2 blink({i})')
led2.high()
await uasyncio.sleep(0.2)
led2.low()
await uasyncio.sleep(0.2)
print('------LED2 reset')
detect=0
lock.release()#ロック解放
else:
print('LED2 wait 1sec')
await uasyncio.sleep(1)
print('------LED2 ',detect)
#非同期処理
async def main():
global detect # detect:検出フラグ
detect=0
lock = uasyncio.Lock() #共有ロックを作成
task1 = uasyncio.create_task(LED1())
task2 = uasyncio.create_task(LED2(lock))#ロック使用を設定
task3 = uasyncio.create_task(Sens(lock))#ロック使用を設定
await task1
await task2
await task3
uasyncio.run(main())
実行結果
結果は以下のようになりました。※Thonnyのshellに表示されます。
出力表示だけなのでわかり難いですが、task2、task3がLock処理されています。
>>> %Run -c $EDITOR_CONTENT
LED1------
LED1 on
LED2------
LED2 wait 1sec
Sens------
------Check 0
------LED1 0
LED1 on
detect #検知
------Check 1
------LED1 1
LED1 on
------LED2 1 #LED2点滅 task2
LED2 blink(0) #LED2点滅終わるまでSens(task3)はブロック
------LED1 1 #LED1(task1)は並行動作している
LED1 on
LED2 blink(1)
------LED1 1
LED1 on
LED2 blink(2)
------LED1 1
LED1 on
LED2 blink(3)
------LED1 1
LED1 on
LED2 blink(4)
------LED1 1
LED1 on
------LED2 reset #LED2点滅終わり
------LED2 0
LED2 wait 1sec
------Check 0
省略
KeyboardInterrupt:
>>>
まとめ
uasyncioのclass ‘Lock’の使い方が少しわかったような気がします。